引子:小萝卜的例子
希望小萝卜具有自主运动能力。
定位和建图可以看成感知的内外之分:
- 一方面,要明白自身的状态(即位置);
- 另一方面,也要了解外在的环境(即地图)。
一类传感器是携带于机器人本体上的,测到的通常都是一些间接的物理量而不是直接的位置数据,这种定位方案可适用于未知环境;
另一类是安装于环境中的,限制了机器人的使用范围。
当谈论视觉 SLAM时,主要是指如何用相机解决定位和建图问题。
相机:以一定速率拍摄周围的环境,形成一个连续的视频流。
按照工作方式的不同,可分为:单目相机(Monocular)、双目相机(Stereo)、深度相机(RGB-D)。
单目相机
照片本质上是拍照时的场景(Scene)在相机的成像平面上留下的一个投影。它以二维的形式反映了三维的世界。
运动(Motion):如果相机往右移动,那么图像里的东西就会往左边移动,这就给我们推测运动带来了信息;
结构(Structure):近处的物体移动快,远处的物体则运动缓慢。于是,在相机移动时,这些物体在图像上的运动就形成了视差。
单目 SLAM 估计的轨迹和地图将与真实的轨迹和地图相差一个因子,也就是所谓的尺度(Scale)。
平移之后才能计算深度,以及无法确定真实尺度。根本原因是:通过单张图像无法确定深度。
双目相机
两个相机之间的距离(基线:Baseline)是已知的,这和人眼非常相似。
基线距离越大,能够测量到的就越远。
相对于人类非常笨拙,需要大量的计算才能估计每一个像素点的深度。需要使用 GPU 和 FPGA 设备加速后,才能实时输出整张图像的距离信息,计算量是双目的主要问题之一。
深度相机
通过红外结构光或 Time-of-Flight(ToF)原理,主动向物体发射光并接收返回的光。
不像双目相机那样通过软件计算来解决。
主要用于室内,室外则较难应用。
经典视觉 SLAM 框架
SLAM 需要一个完善的框架: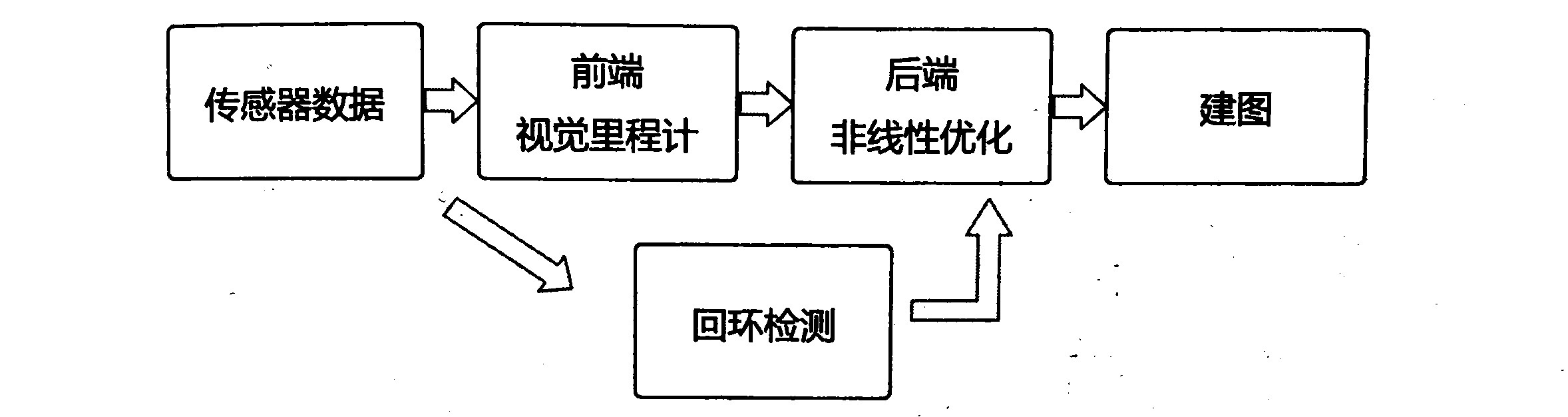
如果把工作环境限定在静态、刚体、光照变化不明显、没有人为干扰的场景,那么,这个 SLAM 系统是相当成熟的了。
视觉里程计(Visual Odometry)
VO 又称为前端(Front End),只计算相邻时刻的运动,而和再往前的过去的信息没有关联。
仅通过视觉里程计来估计轨迹,将不可避免地出现累积漂移(Accumulating Drift),解决漂移问题,需要两种技术:
- 回环检测:负责把“机器人回到原始位置”的事情检测出来;
- 后端优化:根据该信息,校正整个轨迹的形状。
后端优化(Optimization)
后端接收不同时刻视觉里程计测量的相机位姿,以及回环检测的信息。由于接在 VO 之后,又称为后端(Back End)。
后端优化要考虑的问题,就是如何从这些带有噪声的数据中估计整个系统的状态,以及这个状态估计的不确定性有多大——这称为最大后验概率估计(Maximum-a-Posteriori,MAP)。
前端和计算机视觉研究领域更为相关,比如图像的特征提取与匹配等;后端则主要是滤波与非线性优化算法。
SLAM 问题的本质:对运动主体自身和周围环境空间不确定性的估计。
回环检测(Loop Closing)
如果检测到回环,它会把信息提供给后端进行处理。
需要让机器人具有识别到过的场景的能力,可以判断图像间的相似性来完成回环检测。
由于图像的信息非常丰富,使得正确检测回环的难度降低了不少。
建图(Mapping)
一个相机,它有 6 个自由度的运动,我们至少需要一张三维的地图;想要一个漂亮的重建结果,不仅是一组空间点,还需要带纹理的三角面片。
对于地图,大体上可以分为度量地图和拓扑地图两种。
度量地图(Metric Map)
- 稀疏(Sparse)地图:由路标(Landmark)组成的地图,而不是路标的部分就可以忽略掉,对于
定位来说,稀疏地图就足够了; - 稠密(Dense)地图:着重于建模所有看到的东西,用于
导航时,往往需要稠密的地图。
二维度量地图由许多小格子(Grid)组成,三维度量地图则由许多小方块(Voxel)组成。一个小块含有占据、空闲、未知三种状态。
需要存储每一个格点的状态,会耗费大量的存储空间,许多细节部分是无用的;有时候会出现一致性问题,很小的一点转向误差,可能会导致出现重叠,使地图失效。
拓扑地图(Topological Map)
由节点和边组成,只考虑节点间的连通性,不考虑如何从 A 点到达 B 点。是一种更为紧凑的表达方式。
SLAM 问题的数学表述
- 运动:我们要考虑从 k-1 时刻到 k 时刻,小萝卜的位置 x 是如何变化的;
- 观测:假设小萝卜在 k 时刻于 xk处探测到了某一路标yj,我们要考虑这件事情是如何用数学语言来描述的。
针对不同的传感器,运动方程和观测方程有不同的参数化形式,我们把它们取成通用的抽象形式:
这两个方程描述了最基本的 SLAM 问题:当知道运动测量的读数 u,以及传感器的读数 z 时,如何求解定位问题(估计 x)和建图问题(估计 y)?这时,我们就把 SLAM 问题建模成了一个状态估计问题:如何通过带有噪声的测量数据,估计内部的、隐藏着的状态变量?
按照运动和观测方程是否为线性,噪声是否服从高斯分布进行分类。分为线性/非线性和高斯/非高斯系统。
其中,线性高斯系统(Linear Gaussian,LG)是最简单的,它的无偏的最优估计可以由卡尔曼滤波器(Kalman Filter,KF)给出;而在复杂的非线形非高斯系统(Non-Linear Non-Gaussian,NLNG)中,我们会使用以扩展卡尔曼滤波器(Extended Kalman Filter,EKF)和非线性优化两大类方法去求解。
时至今日,主流视觉 SLAM 使用以图优化(Graph Optimization)为代表的优化技术进行状态估计。我们认为优化技术已经明显优于滤波器技术,只要计算资源允许,通常都偏向于使用优化方法。
数学知识:
- 对 6 自由度的位姿,如何表达它,如何优化它;
- 观测方程如何参数化,空间中的路标点是如何投影到一张照片上。需要解释相机的成像模型;
- 知道了这些信息,怎么求解上述方程。需要非线性优化的知识。
位姿这个词表示“位置”加上“姿态”,包含了旋转(Rotation)和平移(Translation)。
实践:编程基础
使用 cmake
任意一个 C++ 程序都可以用 g++ 来编译,在历史上工程师们曾使用 makefile 进行自动编译,cmake 比它更加方便。
在一个 cmake 工程中,我们会用 cmake 命令生成一个 makefile 文件,然后,用 make 命令根据这个 makefile 文件的内容编译整个工程。
MakeFile 是一个自动化编译的脚本,我们用 cmake-make 的做法,cmake 过程处理了工程文件之间的关系,降低了维护整个工程的难度;而 make 过程实际调用了 g++ 来编译程序。
我们新建了一个中间文件夹“build”,这样,cmake 产生的中间文件就会生成在 build 文件夹中,当发布源代码时,只要把 build 文件夹删掉即可。
使用库
程序代码由头文件和源文件组成,带有 main 函数的源文件编译成可执行程序,其他的编译成库文件。
一个库往往是许多算法、程序的集合。
在 Linux 中,库文件分成静态库和共享库两种,静态库以 .a 作为后缀名,共享库以 .so 结尾。
静态库每次被调用都会生成一个副本,而共享库则只有一个副本。
如果可执行程序想调用库文件中的函数,它需要参考该库提供的头文件,以明白调用的格式。同时,要把可执行程序链接到库文件上。
只要拿到了头文件和库文件,就可以调用这个库了。
使用 IDE
IDE(Integrated Development Environment)为开发者提供了跳转、补全、断点调试等很多方便的功能。
在 Linux 中,默认的调试工具 gdb 只提供了文本界面,有些 IDE 提供了断点调试功能(底层仍旧是 gdb),Kdevelop 就是其中之一。
对于编译类型,通常有调试用的 Debug 模式与发布用的 Release 模式。启动器:既可以直接选择一个 cmake 的工程目标,也可以直接指向一个二进制文件(推荐)。
在断点处,可以用单步运行(F10)、单步跟进(F11)、单步跳出(F12)功能控制程序的运行。