地图软件是如何计算出最优出行路径的
像 Google 地图、百度地图、高德地图这样的地图软件,我想你应该经常使用吧?如果想从家开车到公司,你只需要输入起始、结束地址,地图就会给你规划一条最优出行路线。这里的最优,有很多种定义,比如最短路线、最少用时路线、最少红绿灯路线等等。作为一名软件开发工程师,你是否思考过,地图软件的最优路线是如何计算出来的吗?底层依赖了什么算法呢?
算法解析
解决软件开发中的实际问题,最重要的一点就是建模,也就是将复杂的场景抽象成具体的数据结构。我们把每个岔路口看作一个顶点,岔路口与岔路口之间的路看作一条边,路的长度就是边的权重。如果路是单行道,我们就在两个顶点之间画一条有向边;如果路是双行道,我们就在两个顶点之间画两条方向不同的边。这样,整个地图就被抽象成一个有向有权图。于是,我们要求解的问题就转化为,在一个有向有权图中,求两个顶点间的最短路径:
1 | public class Graph |
想要解决这个问题,有一个非常经典的算法,最短路径算法(Shortest Path Algorithm),更加准确地说,是单源最短路径算法(一个顶点到一个顶点)。提到最短路径算法,最出名的莫过于 Dijkstra 算法了。所以,我们现在来看,Dijkstra 算法是怎么工作的:
1 | // 因为 Java 提供的优先级队列,没有暴露更新数据的接口,所以我们需要重新实现一个 |
我们用 vertexes 数组,记录从起始顶点到每个顶点的距离(dist)。起初,我们把所有顶点的 dist 都初始化为无穷大,把起始顶点的 dist 值初始化为 0,然后将其放到优先级队列中。
我们从优先级队列中取出 dist 最小的顶点 minVertex,然后考察这个顶点可达的所有顶点(代码中的 nextVertex)。如果 minVertex 的 dist 值加上 minVertex 与 nextVertex 之间边的权重 w 小于 nextVertex 当前的 dist 值,也就是说,存在另一条更短的路径,它经过 minVertex 到达 nextVertex。那我们就把 nextVertex 的 dist 更新为 minVertex 的 dist 值加上 w。然后,我们把 nextVertex 加入到优先级队列中。重复这个过程,直到找到终止顶点 t 或者队列为空。
predecessor 数组的作用是为了还原最短路径,它记录每个顶点的前驱顶点。最后,我们通过递归的方式,将这个路径打印出来;inqueue 数组是为了避免将一个顶点多次添加到优先级队列中。我们更新了某个顶点的 dist 值之后,如果这个顶点已经在优先级队列中了,就不要再将它重复添加进去了。我举个例子,再给你解释一下: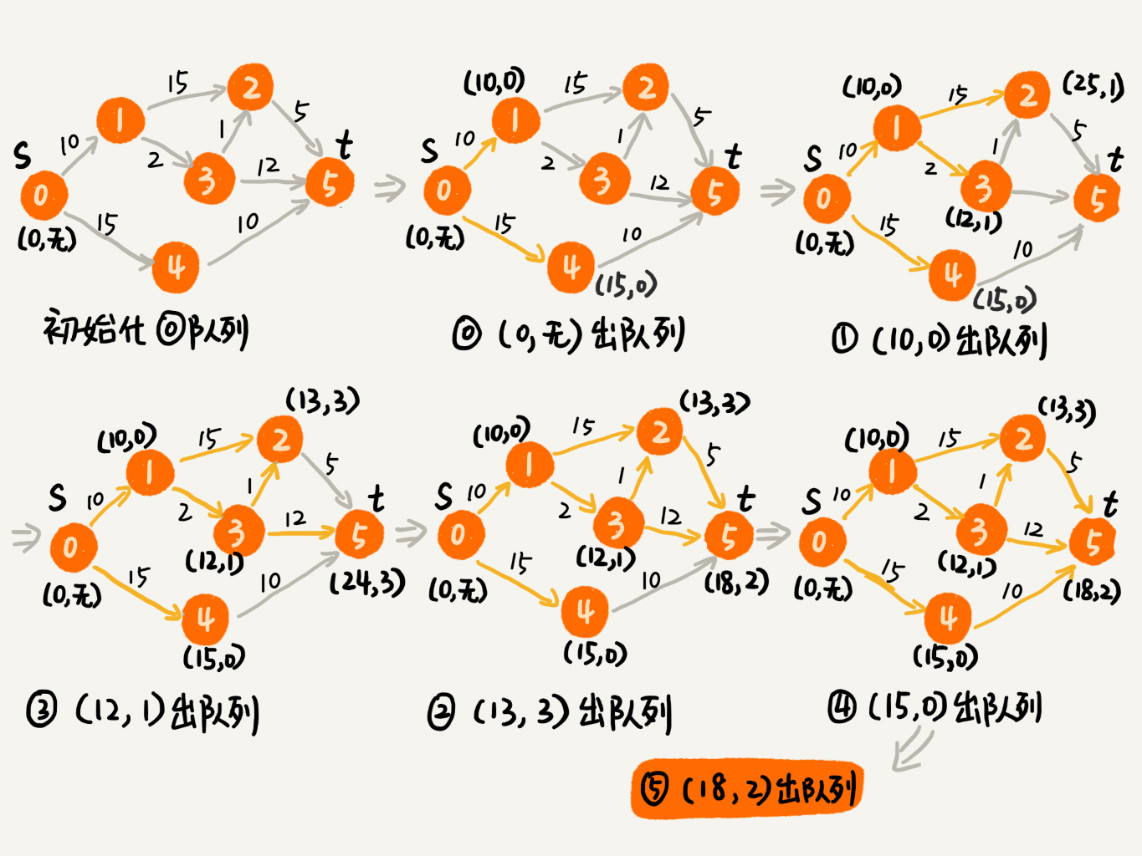
在刚刚的代码实现中,最复杂就是 while 循环嵌套 for 循环那部分代码了。while 循环最多会执行 V 次,而内部的 for 循环的执行次数不确定,跟每个顶点的相邻边的个数有关,我们分别记作 E0, E1, E2, …, E(V-1)。如果我们把这 V 个顶点的边都加起来,最大也不会超过图中所有边的个数 E。
for 循环内部的代码涉及从优先级队列取数据、往优先级队列中添加数据、更新优先级队列中的数据,这样三个主要的操作。我们知道,优先级队列是用堆来实现的,堆中的这几个操作,时间复杂度都是 O(logV)。所以,综合这两部分,再利用乘法原则,整个代码的时间复杂度就是 O(E*logV)。
前面讲最短路径的时候,每条边的权重是路的长度。在计算最少时间的时候,算法还是不变,我们只需要把边的权重,从路的长度变成经过这段路所需要的时间。不过,这个时间会根据拥堵情况时刻变化。
每经过一条边,就要经过一个红绿灯。关于最少红绿灯的出行方案,实际上,我们只需要把每条边的权值改为 1 即可,算法还是不变,可以继续使用前面讲的 Dijkstra 算法。不过,边的权值为 1,也就相当于无权图了,我们还可以使用之前讲过的广度优先搜索算法。因为我们前面讲过,广度优先搜索算法计算出来的两点之间的路径,就是两点的最短路径。
总结引申
我们有一个翻译系统,只能针对单个词来做翻译。如果要翻译一整个句子,我们需要将句子拆成一个一个的单词,再丢给翻译系统。针对每个单词,翻译系统会返回一组可选的翻译列表,并且针对每个翻译打一个分,表示这个翻译的可信程度: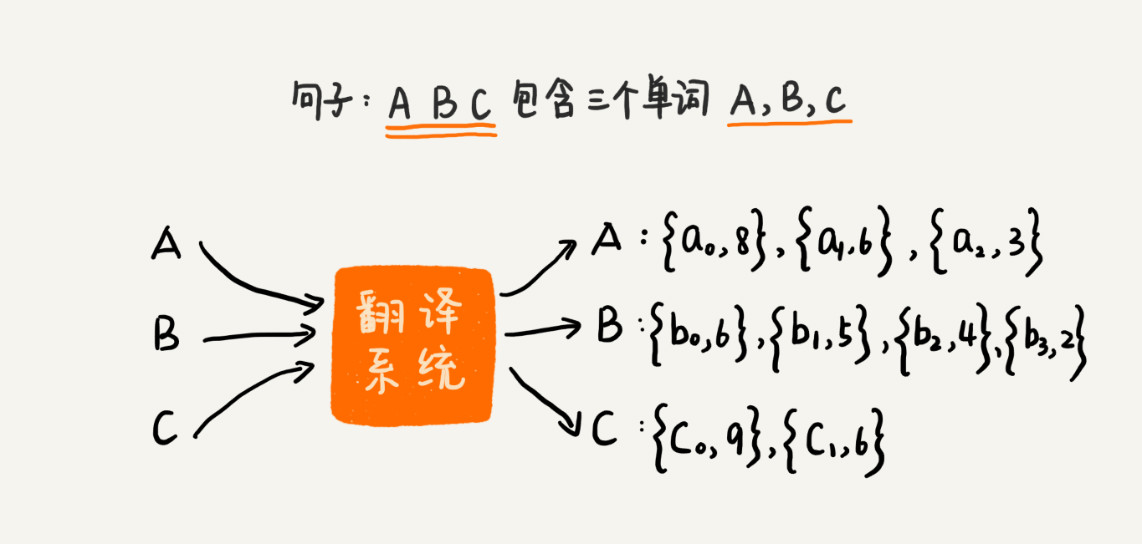
针对每个单词,我们从可选列表中,选择其中一个翻译,组合起来就是整个句子的翻译。每个单词的翻译的得分之和,就是整个句子的翻译得分。随意搭配单词的翻译,会得到一个句子的不同翻译。针对整个句子,我们希望计算出得分最高的前 k 个翻译结果: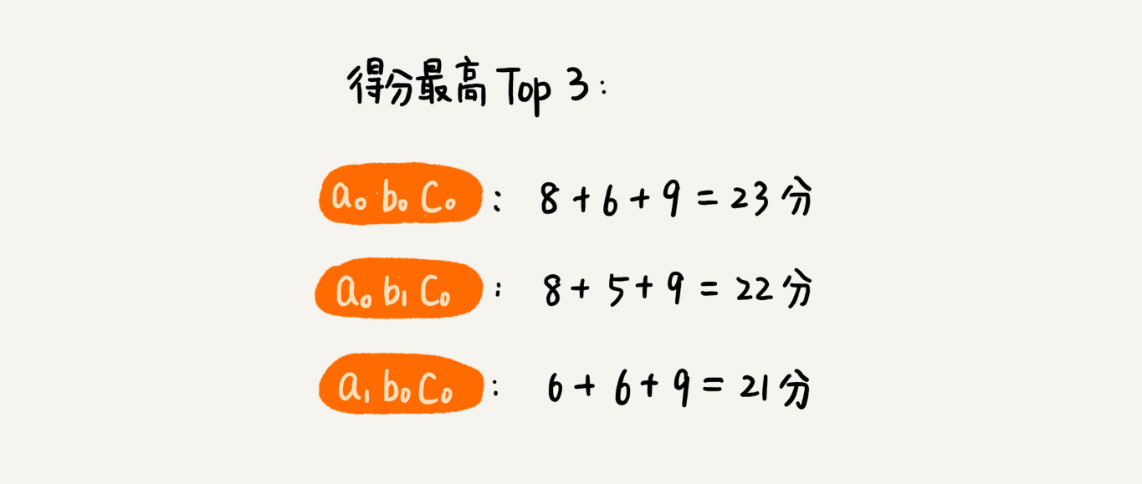
当然,最简单的办法还是借助回溯算法,穷举所有的排列组合情况,然后选出得分最高的前 k 个翻译结果。但是,这样做的时间复杂度会比较高,是 O(m^n),其中,m 表示平均每个单词的可选翻译个数,n 表示一个句子中包含多少个单词。实际上,这个问题可以借助 Dijkstra 算法的核心思想,非常高效地解决。每个单词的可选翻译是按照分数从大到小排列的,所以 a0b0c0 肯定是得分最高组合结果。我们把 a0b0c0 及得分作为一个对象,放入到优先级队列中。
我们每次从优先级队列中取出一个得分最高的组合,并基于这个组合进行扩展。扩展的策略是每个单词的翻译分别替换成下一个单词的翻译。比如 a0b0c0 扩展后,会得到三个组合:a1b0c0, a0b1c0, a0b0c1。我们把扩展之后的组合,加到优先级队列中。重复这个过程,直到获取到 k 个翻译组合或者队列为空:
假设句子包含 n 个单词,每个单词平均有 m 个可选的翻译,我们求得分最高的前 k 个组合结果。每次一个组合出队列,就对应着一个组合结果,我们希望得到 k 个,那就对应着 k 次出队操作。每次有一个组合出队列,就有 n 个组合入队列。优先级队列中出队和入队操作的时间复杂度都是 O(logX),X 表示队列中的组合个数。所以,总的时间复杂度就是 O(k*n*logX)。
k 次出入队列,队列中的总数据不会超过 k*n,也就是说,出队、入队操作的时间复杂度是 O(log(k*n))。所以,总的时间复杂度就是 O(k*n*log(k*n)),比之前的指数级时间复杂度降低了很多。